
动机
一个典型的RSM可能包含成千上万甚至数百万个VPLs。对着色点 p,计算每一个VPL的贡献是极其耗费性能的。一个朴素的优化是只在着色点 p 周围的一个固定半径内采样VPLs。
但是,即便如此,也不是所有邻近的VPL都同样重要。有些VPL可能因为角度、遮挡或者自身亮度很低,对着色点 p 的贡献微乎其微。如果我们用均匀采样(Uniform Sampling),在采样区域内随机或均匀地选取VPLs,就会浪费大量的计算在这些贡献很小的VPL上,导致结果充满噪点(noise),或者需要极大量的样本才能获得平滑的效果。
重要性采样 (Importance Sampling)
重要性采样的核心思想是:与其均匀地采样,不如“智能”地将更多的采样机会分配给那些贡献最大的VPLs。这样,我们就可以用更少的样本数量,获得更高质量、更低噪点的结果。
一个VPL对点 p 的光照贡献有多“重要”呢?这通常取决于以下几个因素,这构成了我们的重要性度量(Importance Metric):
- VPL的辐射通量(Flux):VPL本身越亮,它的贡献就越大。
- 几何项(G-Term):
- 着色点
p的法线n与VPL -> p方向的夹角 ($cos\theta_p$)。 - VPL的法线 $n_{vpl}$ 与
p -> VPL方向的夹角 ($cos\theta_{vpl}$)。 p与VPL之间的距离衰减 ($1/d^2$)。
- 着色点
- BRDF:着色点
p的表面材质属性。
综合起来,一个VPL的贡献可以近似地用下面的渲染方程的简化形式来描述:
\[L_o(p, \omega_o) = \int_{\Omega} f_r(p, \omega_i, \omega_o) \cdot L_i(p, \omega_i) \cdot \cos(\theta_i) \, d\omega_i\]在使用VPLs时,这个积分变成了对所有VPLs的求和:
\[L_{indirect}(p) \approx \sum_{k=1}^{N} \frac{\Phi_k}{\pi} \cdot BRDF(p) \cdot \frac{\max(0, n \cdot \omega_k) \cdot \max(0, n_k \cdot -\omega_k)}{||p_k - p||^2} \cdot V(p, p_k)\]其中:
- $\Phi_k$ 是第k个VPL的通量(flux)。
- $BRDF(p)$ 是点p的BRDF(代码中是
albedo / PI)。 - $p_k, n_k$ 是第k个VPL的位置和法线。
- $\omega_k$ 是从p指向 $p_k$ 的归一化向量。
- $V(p, p_k)$ 是可见性函数(在代码中通过剔除背面和距离过近的点来简化)。
重要性采样的目标就是找到一个概率密度函数(PDF),使得采样分布与这个贡献函数尽可能相似。这里类似于光线追中中蒙题卡洛采样的思想,使用PDF确定光线。
均匀采样 vs. 重要性采样
均匀采样
这是传统的、非重要性采样的方法。
// === UNIFORM SAMPLING - Original Strategy ===
vec2 offs[32] = vec2[32](...); // 预定义的32个均匀分布的采样偏移
int N = min(samples, 32);
...
for (int i = 0; i < N; ++i) {
// 对偏移加上一点随机扰动,减少条带状瑕疵
vec2 jitter = ...;
vec2 duv = (offs[i] + jitter * 0.05) * radius / ...;
vec2 uv = clamp(baseUV + duv, 0.0, 1.0);
// 从RSM纹理中获取VPL信息
vec3 vplPos = texture(rsmPositionTex, uv).xyz;
vec3 vplNor = normalize(texture(rsmNormalTex, uv).xyz);
vec3 flux = texture(rsmFluxTex, uv).xyz;
// ... (检查VPL有效性) ...
// 计算光照贡献
vec3 wi = vplPos - p;
float dist = length(wi);
wi = normalize(wi);
float cos1 = max(dot(n, wi), 0.0);
float cos2 = max(dot(vplNor, -wi), 0.0);
float distWeight = 1.0 / (1.0 + dist * dist);
float sampleWeight = cos1 * cos2 * distWeight; // 权重
vec3 brdf = albedo / 3.14159;
bounce += brdf * flux * sampleWeight;
totalWeight += sampleWeight;
}
解释:
- 它使用一个固定的采样模式
offs在着色点周围的RSM区域内进行采样。 - 每个样本被选中的概率是相同的。
- 它计算每个VPL的贡献 (
brdf * flux * sampleWeight),然后累加起来。 - 这种方法简单直接,但效率低下。如果采样区域内大部分VPL的
flux很小或者sampleWeight接近于0,那么很多采样都是无效的。
三阶段自适应重要性采样
阶段 1: 粗略分析 (Coarse Analysis Pass)
这个阶段的目标是快速找到哪个方向的VPLs最重要。
// Phase 1: Coarse Analysis Pass (8 samples)
vec2 coarseOffs[8] = vec2[8](...); // 8个方向上的粗略采样点
float maxImportance = 0.0;
vec2 bestRegion = vec2(0.0);
for (int i = 0; i < 8; ++i) {
vec2 duv = coarseOffs[i] * radius * 0.5 / ...;
vec2 uv = clamp(baseUV + duv, 0.0, 1.0);
// 获取VPL信息
vec3 vplPos = texture(rsmPositionTex, uv).xyz;
vec3 vplNor = texture(rsmNormalTex, uv).xyz;
vec3 flux = texture(rsmFluxTex, uv).xyz;
if (length(vplPos) < 0.1) continue;
// 计算重要性度量
vec3 wi = normalize(vplPos - p);
float cos1 = max(dot(n, wi), 0.0);
float cos2 = max(dot(vplNor, -wi), 0.0);
float fluxMag = length(flux);
float importance = cos1 * cos2 * fluxMag; // 核心:重要性函数
if (importance > maxImportance) {
maxImportance = importance;
bestRegion = duv; // 记录下最重要的区域的偏移方向
}
}
解释:
- 它只用了8个样本,在周围8个方向上进行探测。
- 它计算了一个重要性度量(Importance Metric):
\(\)\(\text{Importance} = \max(0, n \cdot \omega_i) \cdot \max(0, n_{vpl} \cdot -\omega_i) \cdot ||\text{Flux}||\)
\(\)这个公式忽略了距离衰减(因为这是一个方向性探测)和BRDF(假设为常数),但抓住了影响贡献度的核心要素:几何关系和VPL亮度。 - 循环结束后,
bestRegion变量存储了最有潜力的采样方向。
阶段 2: 集中密集采样 (Focused Dense Sampling)
在找到“黄金区域”后,这个阶段将大部分样本(20个)集中投放到该区域内部及其周围。
// Phase 2: Focused Dense Sampling (20 samples)
vec2 denseOffs[20] = vec2[20](...); // 20个在小范围内的密集偏移
...
for (int i = 0; i < 20; ++i) {
vec2 localOffset = denseOffs[i] * 0.3;
// 关键:所有采样都围绕着 bestRegion 进行
vec2 duv = (bestRegion + localOffset * radius / ...);
vec2 uv = clamp(baseUV + duv, 0.0, 1.0);
// ... 和均匀采样类似,获取VPL信息并计算贡献 ...
bounce += brdf * flux * sampleWeight;
totalWeight += sampleWeight;
}
解释:
- 所有的采样偏移
duv都是基于第一阶段找到的bestRegion计算的。这确保了大部分计算资源都用在了刀刃上。 - 这种策略极大地提高了采样的效率,因为我们更有可能采样到贡献大的VPLs。
阶段 3: 覆盖采样 (Coverage Sampling)
只在最亮的区域采样可能会导致问题:如果场景中有多个次要的光源贡献区域,完全忽略它们会造成能量损失和颜色偏移。这个阶段用少量样本(4个)来覆盖更广泛的区域,以拾取那些被前两个阶段可能忽略掉的贡献。
// Phase 3: Coverage Sampling (4 samples)
vec2 coverageOffs[4] = vec2[4](...); // 4个随机分布在较大范围的偏移
...
for (int i = 0; i < 4; ++i) {
vec2 duv = coverageOffs[i] * radius / ...;
// ... 计算并累加贡献 ...
}
解释:
- 这4个样本被放置在采样半径内比较分散的位置,扮演着“查漏补补缺”的角色。
- 它确保了即使我们的“最佳区域”判断有误,或者存在多个重要区域时,渲染结果也不会出现大的瑕疵。
效果对比
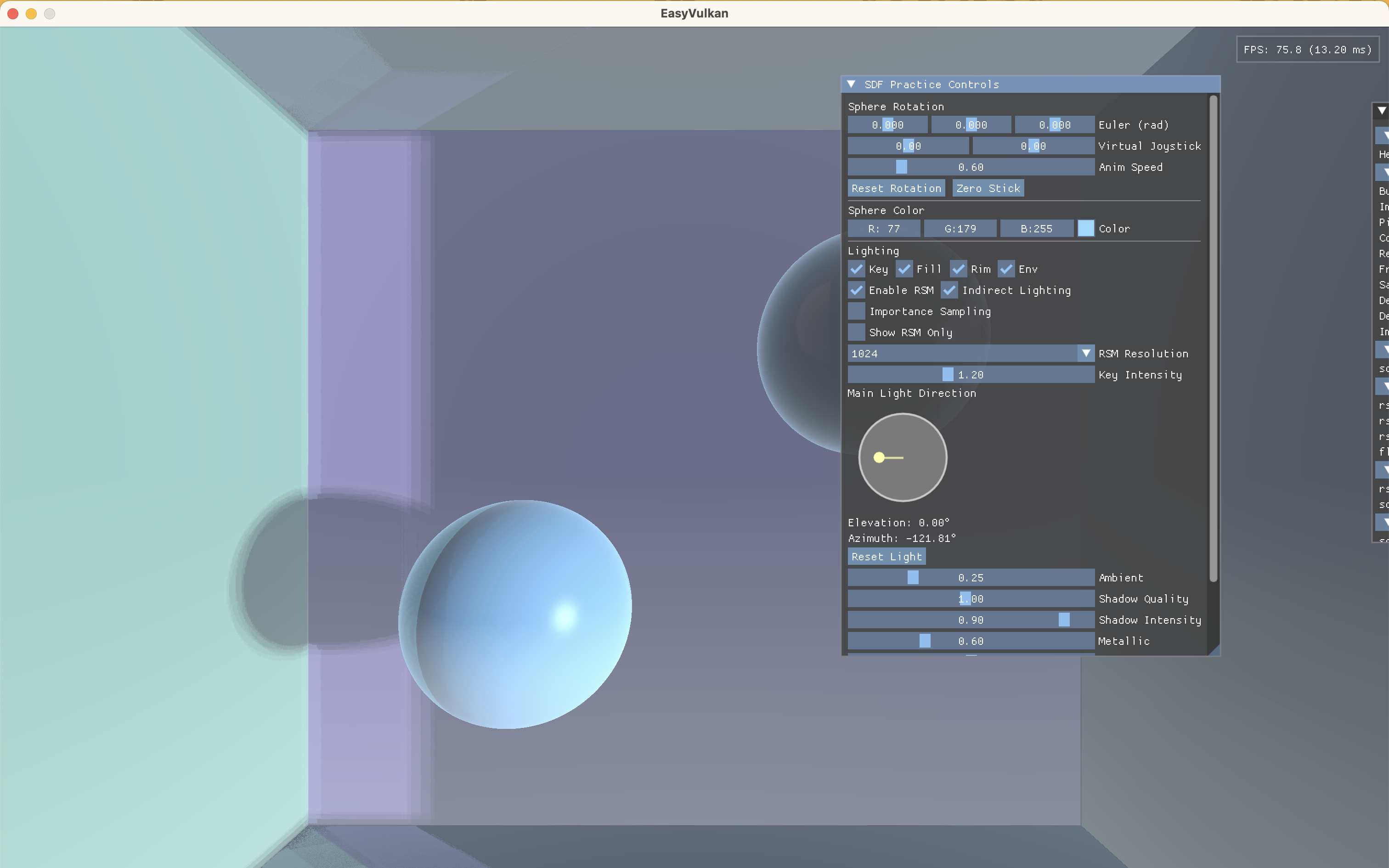
不启用重要性采样:
启用重要性采样:
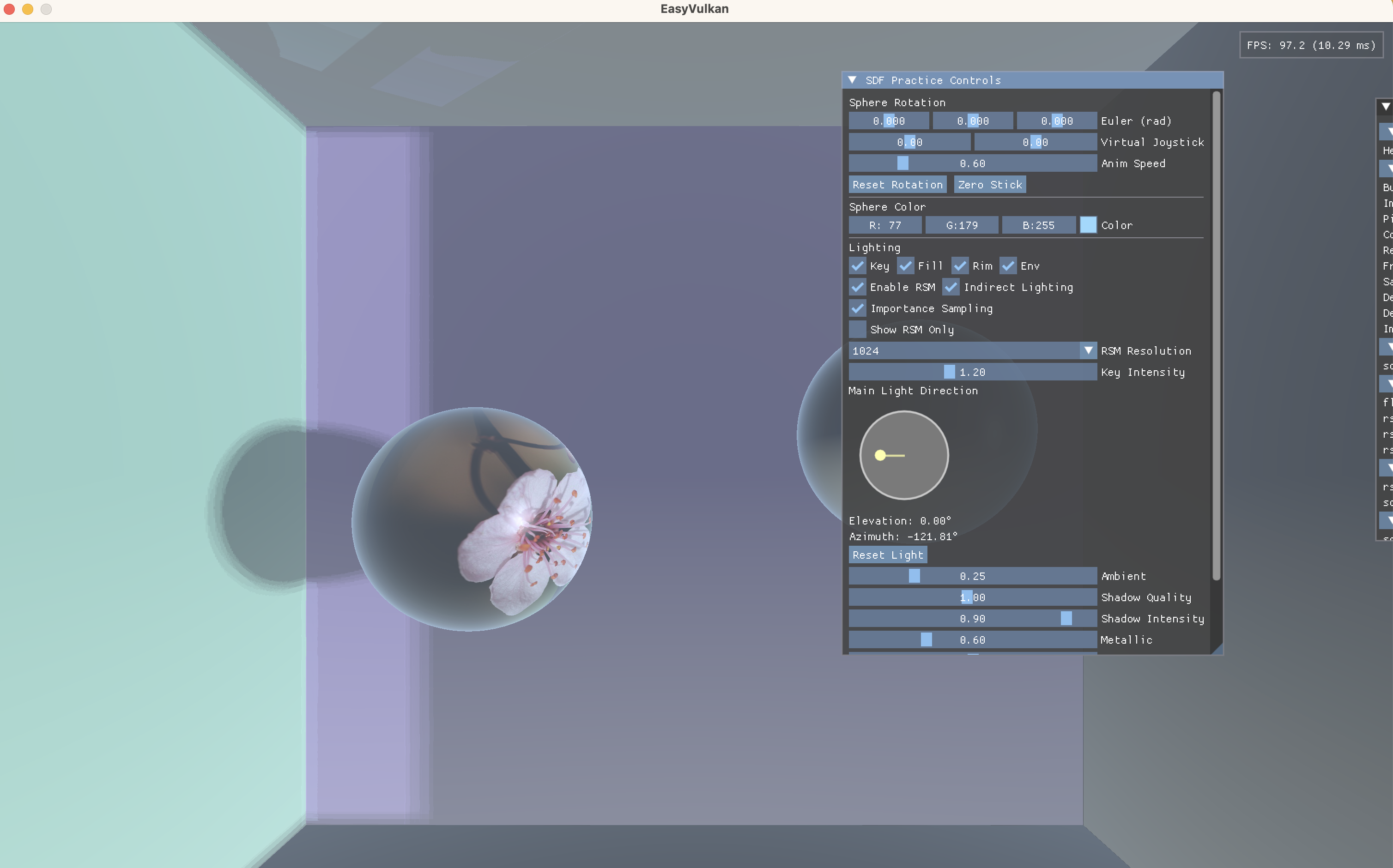
其实除了墙角处效果有明显区别,其他多数区域效果并没有明显提升,可能是由于当前的采样点数量(32)已经足够大,即使均匀采样也能取得不错的效果
速度对比
然而,启用重要性采样后,帧时间从12ms降低到9ms。在代码中,均匀采样和重要性采样都采样32个点,在采样点数量一致的情况下,执行速度的提升主要是由于==重要性采样的工作模式对GPU的并行处理流水线极为友好,而均匀采样的“盲目性”则会频繁地打断流水线,造成效率下降。==
线程发散 (Thread Divergence)
GPU并非一个一个地处理像素,而是将屏幕上成百上千的像素(着色器实例)打包成一个个线程组(在NVIDIA上称为Warp,通常是32个线程;在AMD上称为Wavefront)。在同一个线程组内,所有线程在同一时刻执行完全相同的指令。
现在我们来看循环内部的关键判断语句:
// 这三行是性能的关键
if (length(vplPos) < 0.1) continue; // VPL无效,跳过
if (dist < 0.05) continue; // VPL离自己太近,跳过
if (cos1 < 0.05 || cos2 < 0.05) continue; // VPL朝向不对,跳过
当一个线程组(比如32个相邻的像素)遇到if语句时,会发生什么?
-
理想情况 (高连贯性): 如果线程组里所有32个线程的判断结果都一样(比如都为
true或都为false),那么GPU就可以无缝地、集体地执行if块内的代码或者集体跳过。这是最高效的。 -
糟糕情况 (线程发散): 如果线程组里部分线程结果为
true,另一部分为false,就发生了“线程发散”。这时,GPU不得不同时处理两个分支。它会先执行if为true的路径,此时false的线程被临时“关闭”等待;然后再执行if为false的路径,此时true的线程被“关闭”等待。最终,整个线程组的耗时是两条路径耗时之和,效率大打折扣。
现在我们把这个原理应用到两种采样方法上:
均匀采样 (12ms,慢)
- 它的采样点是分散的、随机的。
- 对于一个线程组(32个相邻像素),它们各自随机采样的32个VPL,情况会非常混乱:
- 像素A的第5个样本可能是无效的 (
continue)。 - 邻居像素B的第5个样本可能是有效的 (执行完整计算)。
- 邻居像素C的第5个样本可能因为朝向不对而
continue。
- 像素A的第5个样本可能是无效的 (
- 这就导致在循环的几乎每一次迭代中,线程组内部都存在大量的线程发散。GPU的流水线被频繁地打断和等待,即使很多线程因为
continue跳过了大量计算,但整个线程组仍然要为那些没有跳过的“幸运”线程付出等待的时间成本。
重要性采样 (9ms,快)
- 它的采样点是高度结构化和局部化的。
- 由于相邻像素的位置和法线通常很相似,它们在第一阶段找到的
bestRegion(最佳区域)也极有可能是同一个或非常邻近的区域。 - 因此,当一个线程组(32个相邻像素)进入第二阶段的密集采样时,它们采样的VPL都来自RSM纹理上的一小块相似区域。
- 结果就是:
- 如果这个区域的VPL是有效的,那么线程组里几乎所有线程采到的VPL也都是有效的,大家一起执行完整的计算。
- 如果这个区域的VPL是无效的,那么线程组里几乎所有线程都会触发
continue,大家一起跳过。
- 这种高度的执行连贯性最大化了GPU的并行效率。虽然它可能执行了更多次完整的循环体(因为采到的都是有效样本),但由于没有线程发散造成的流水线停顿,整体的“吞吐量”反而更高,执行速度更快。
缓存效率 (Cache Locality)
采样点的分布也会影响缓存的效率,这一思想在我们之前的一个优化模糊算法的项目中也有体现。
- 均匀采样的样本在RSM纹理上是随机分散的,这会导致纹理缓存(Texture Cache)命中率低。GPU需要频繁地从速度较慢的显存中去读取数据。
- 重要性采样的样本高度集中在
bestRegion周围,这使得纹理缓存命中率极高。一旦第一个线程读取了某一块纹理数据,它就会被加载到高速缓存中,后续线程(无论是同一个像素的后续样本,还是邻居像素的样本)都能极快地从缓存中获取数据,进一步提升了性能。