
动机
[!小球的底部没有接受到反射光。]
处理这种情况(缺少一次间接光照)最直接的方法是使用RSM。但是正如之前的博客提到的,基于光线步进的软阴影和基于Shadow Map的阴影(RSM和Shadow Map可以看作一类方法)可以被看作两种生成阴影的方法。
因此在使用RSM之前,还需要将之前的阴影生成的方法改为基于Shadow Map的方法。
软阴影算法问题
==产生的阴影总是矩形规则的==
这里询问了AI模型,他的回答是:
- 核心原因
- RSM 阴影是不规则的:它在“光空间”里真地投影几何体。我们先用一个正交光相机把场景光线步进出 position/normal/flux,再在主通道里对这些“光照纹理”做深度比较+PCF 聚合。阴影轮廓因此跟真实物体的光空间轮廓一致(还会叠加分辨率、采样核与偏置带来的不规则性)。
- 软阴影是近似的:`softShadow()` 只是沿单条光线做 SDF 步进,用 `res = min(res, k*h/t)` 这种“局部距离比值”近似可见性。你的房间由多块轴对齐平面用 `min()` 拼出来,接收面本身就是“最近表面”,沿光线的距离场变化在平面/平面交线处是分段线性的,叠加步长上限/阈值后,投到墙上的等值线就会呈现出规则的、近似矩形的边界。这不是几何投影结果,而是该近似在“由平面拼接”的场景里呈现的典型伪影。
- 进一步理解
- RSM 近似了“面积光/多 VPL”的可见性,聚合了很多光空间样本,所以会出现椭圆/弧形乃至锯齿感的真实阴影边界。
- 软阴影近似的是“点光 + 距离场安全步进”,对由 `min(平面…)` 组成的房间会把阴影边界“对齐”到这些平面的主方向,肉眼看起来就是规则矩形。
- 优化的思路
- 在阴影查询中排除接收面:对当前像素所属材质做一次“无接收面”的 `sceneSDF`(或把该平面 SDF 加小偏移/屏蔽),避免接收面主导 `h/t`。
- 多方向/多半径采样(模拟面积光,PCSS 风格):对 `rd` 周围做抖动采样而不是单射线。
- 真正按光空间做一次二次步进(从光源/光相机到接收点再做 SDF 硬测试+PCF)——本质上等价于你现在的 RSM 路线。
时间原因,我还没有做深入的分析,先保留问题,之后详细分析。
- 分析软阴影算法的阴影形状
RSM计算
[[Study/Games104/补充/RSM|RSM]]
效果
核心问题与整体思路
- 问题:SDF 场景通常用 Ray Marching 做直接光照与阴影,但间接光(全局光照)成本高、质量难平衡。
- RSM 思路:从光源视角渲染一次场景,得到三张纹理:
- Position(世界坐标)
- Normal(世界法线)
- Flux(经材质反射后的辐射通量,近似出射光能)
这些纹理中的每个像素可视作一个虚拟点光源(Virtual Point Light, VPL)。主渲染时,围绕当前像素在 RSM 中邻域采样若干 VPL,估算一次反弹间接光。
流水线分两步:
1) Light-pass:构建光源正交相机,Ray Marching 与材质评估,输出 Position/Normal/Flux。
2) Main-pass:投影到光相机平面,做阴影可见性(PCF/深度比较),并在 RSM 上做邻域采样累积间接光,和直接光组合。
SDF 基础与 Ray Marching 复盘
本文代码中的 SDF 以球体和房间(墙/地/顶)构成。距离场与法线估计:
- 距离场:给定位置 p,返回到最近表面的符号距离 $d(p)$
- 法线近似:用四点差分估计梯度
\(\nabla d(p) \approx \Big( d(p+\epsilon\,k_{xyy}) - d(p+\epsilon\,k_{yyx}), d(p+\epsilon\,k_{yxy}) - d(p+\epsilon\,k_{xxx}), d(p+\epsilon\,k_{xxy}) - d(p+\epsilon\,k_{yyx}) \Big)\,\text{并归一化}\)
实际代码采用紧凑写法(四向量加权求和)。Ray Marching 采用安全步进策略:每步前进当前距离场值(设下限避免驻留)。
关键参数:
MAX_STEPS = 128:最多步进次数MAX_DIST = 100.0:最大追踪距离SURF_DIST = 0.006:命中阈值- 步长下限如
max(dS, 0.003)防止在平面/浅角处过度迭代
Part 1:从光源视角生成 RSM(三缓冲)
文件:shaders/rsm_light.frag
1. 光源正交相机与射线构建
代码(节选):
vec2 uv = fragTexCoord * 2.0 - 1.0;
vec3 ro = u.lightOrigin.xyz
+ u.lightRight.xyz * (uv.x * u.lightOrthoHalfSize.x)
+ u.lightUp.xyz * (uv.y * u.lightOrthoHalfSize.y);
vec3 rd = normalize(u.lightDir.xyz);
- 将屏幕 $[0,1]$ UV 映射为光相机平面上的世界位置
ro。 - 使用正交投影:所有像素射线方向
rd相同(与光方向一致)。 lightRight/lightUp为光相机基向量,lightOrthoHalfSize控制覆盖范围(半宽/半高)。
数学上,光相机平面参数化为:
\(\mathbf{ro}(u,v)=\mathbf{o}_L + (2u-1)\,s_x\,\mathbf{r}_L + (2v-1)\,s_y\,\mathbf{u}_L\)
其中 $\mathbf{o}_L$是 lightOrigin, $\mathbf{r}_L$, $\mathbf{u}_L$ 分别是 lightRight, lightUp,$s_x,s_y$ 为半尺寸。
==ro = u.lightOrigin + 水平位移 + 垂直位移==,在3D空间中构建了一个矩形平面。这个平面的中心是 lightOrigin,朝向由 lightRight 和 lightUp 决定,大小由 lightOrthoHalfSize 决定。
注意,当lightOrthoHalfSize值太小时,发出的射线无法覆盖整个场景,RSM的第一个pass只能在场景的一部分上记录G-Buffer,因此会出现明显的光照错误。
错误的光照场景:
// 当前的策略是,在光源视锥体以外的所有区域均视作点亮
if (any(lessThan(uv, vec2(0.0))) || any(greaterThan(uv, vec2(1.0)))) {
return 1.0; // outside light frustum -> treat as lit
}
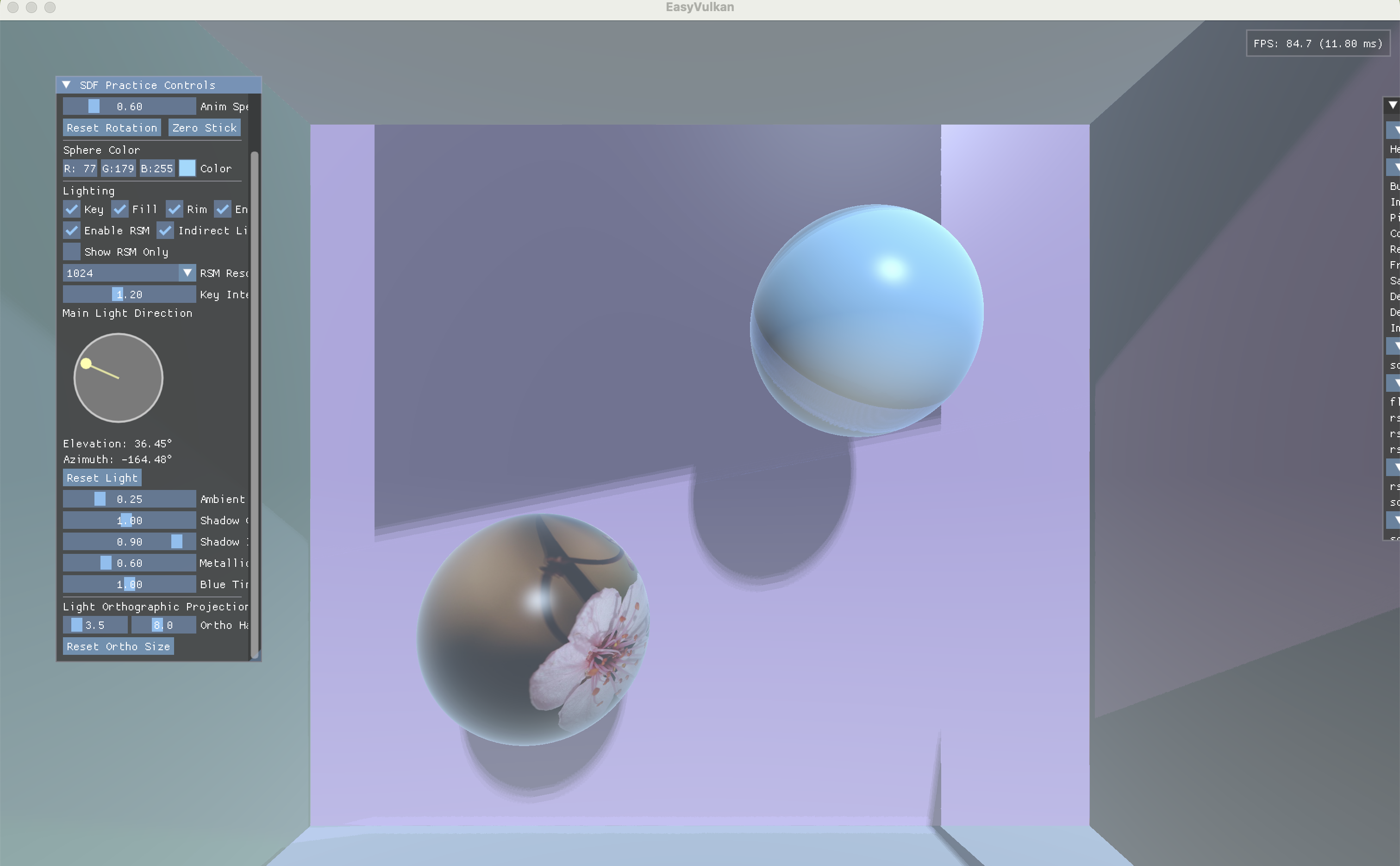
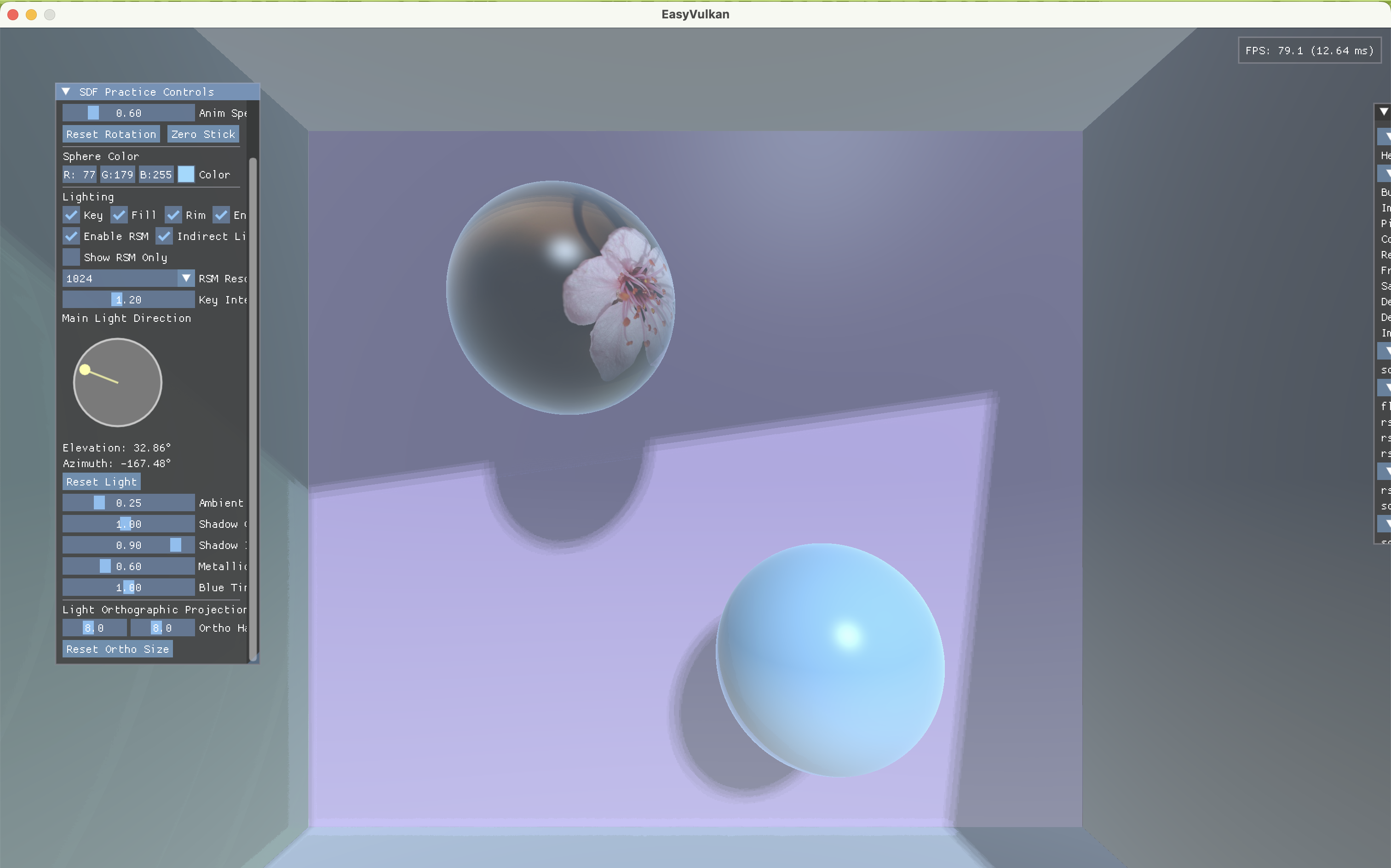
调整光源的大小正确覆盖整个场景:
2. Ray Marching 与命中属性
float d = rayMarch(ro, rd);
if (d >= MAX_DIST) { outPosition=outNormal=outFlux=vec4(0.0); return; }
vec3 pos = ro + rd * d;
vec3 nor = getNormal(pos);
float nDotL = max(dot(nor, -rd), 0.0);
- 未命中写 0,主渲染即可判定该像素无效 VPL。
- 命中后得到世界坐标
pos与法线nor。
法向量计算
对于传统的三角形网格模型,法线通常是预先计算好并存储在顶点数据中的。但SDF描述的是一个隐式曲面(implicit surface),它不是由顶点或三角形定义的,而是由一个函数 sceneSDF(p) 定义的。这个函数返回空间中任意点 p 到场景最近表面的距离。曲面本身就存在于所有满足 sceneSDF(p) = 0 的点上。
核心思想:法线是SDF的梯度
一个标量场(如此处的SDF)的梯度是一个向量,它指向该场值增长最快的方向。对于SDF来说,在表面上的任意一点,距离值增长最快的方向正好是垂直于表面向外的方向——法线方向。
数学公式
一个函数 $f(x, y, z)$ 的梯度,记作 $\nabla f$,其数学定义如下:
\[\nabla f(p) = \left( \frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}, \frac{\partial f}{\partial z} \right)\]其中,$p = (x, y, z)$,$\frac{\partial f}{\partial x}$ 是函数 $f$ 对 $x$ 的偏导数。这个向量的每个分量表示函数在对应坐标轴方向上的变化率。
数值近似
理论上,我们只需要计算 sceneSDF 函数在点 p 处的偏导数即可得到梯度。但在着色器代码中,sceneSDF 函数通常非常复杂,包含各种旋转、平移和 min、max 等操作。对这样的函数进行分析求导(analytically derive the partial derivatives)几乎是不可能的。
因此,我们采用一种数值近似的方法,称为有限差分 (Finite Differences)。其基本思想是:通过在目标点 p 附近的一个极小邻域内对SDF进行采样,来估算其在各个方向上的变化率。
最常用的方法是中心差分法 (Central Differences)。它估算偏导数的方法如下:
\[\frac{\partial f}{\partial x} \approx \frac{f(x+h, y, z) - f(x-h, y, z)}{2h}\]这里,$h$ 是一个非常小的数(在代码中通常称为 epsilon 或 h)。我们通过在x轴正方向和负方向上各移动一点点,然后用两者SDF值的差来近似该方向的变化率。
将这个方法应用到所有三个坐标轴,我们就可以得到梯度的近似值:
\[\nabla \text{sceneSDF}(p) \approx \frac{1}{2h} \begin{pmatrix} \text{sceneSDF}(p + (h, 0, 0)) - \text{sceneSDF}(p - (h, 0, 0)) \\ \text{sceneSDF}(p + (0, h, 0)) - \text{sceneSDF}(p - (0, h, 0)) \\ \text{sceneSDF}(p + (0, 0, h)) - \text{sceneSDF}(p - (0, 0, h)) \end{pmatrix}\]这种方法需要调用6次 sceneSDF 函数,计算成本较高。
优化数值近似方法
如前文所言,使用有限差分需要计算6次场景函数。这里采用了一种常见的优化技巧:通过在空间中构造一个微小的四面体(tetrahedron)来进行采样,仅需要调用4次 sceneSDF 就能估算出梯度。
// 计算SDF在点p处的法线
// 原理:通过采样p点周围极小范围内的SDF值来估算SDF场的梯度,梯度方向即为法线方向
vec3 getNormal(vec3 p) {
const float h = 0.001;
const vec2 k = vec2(1, -1);
return normalize(k.xyy * sceneSDF(p + k.xyy * h) +
k.yyx * sceneSDF(p + k.yyx * h) +
k.yxy * sceneSDF(p + k.yxy * h) +
k.xxx * sceneSDF(p + k.xxx * h));
}
const float h = 0.001;- 定义了一个极小的偏移量
h。这个值需要足够小以精确估算梯度,但又不能太小,否则可能因为浮点数精度问题导致结果错误。0.001是一个常用的经验值。
- 定义了一个极小的偏移量
const vec2 k = vec2(1, -1);- 这是一个辅助向量,用于巧妙地生成四面体的四个顶点方向向量。通过
swizzling操作(如k.xyy),我们可以用它组合出(1, -1, -1),(-1, -1, 1),(-1, 1, -1), 和(1, 1, 1)这些向量。
- 这是一个辅助向量,用于巧妙地生成四面体的四个顶点方向向量。通过
- 核心计算
k.xyy对应vec3(1, -1, -1)k.yyx对应vec3(-1, -1, 1)k.yxy对应vec3(-1, 1, -1)k.xxx对应vec3(1, 1, 1)
整个表达式计算了一个向量:
grad.x = 1 * sceneSDF(p + h*vec3(1,-1,-1)) - 1 * sceneSDF(p + h*vec3(-1,-1,1)) - 1 * sceneSDF(p + h*vec3(-1,1,-1)) + 1 * sceneSDF(p + h*vec3(1,1,1))虽然这个表达式看起来和我们之前推导的中心差分法不同,但它在数学上也是对梯度的有效近似。它通过组合这四个采样点的值,巧妙地估算出了SDF在x, y, z三个方向上的变化率。这种方法的优势在于减少了
sceneSDF的调用次数(从6次降到4次)。 return normalize(...)- 我们需要的是单位法向量,所以必须使用
normalize()函数将其归一化。
- 我们需要的是单位法向量,所以必须使用
3. 材质与通量(Flux)评估
vec3 albedo = getMaterialAlbedo(pos);
vec3 lightColor = u.lightColors[0].rgb * u.lightColors[0].a;
vec3 flux = albedo * lightColor * u.lightDir.w * nDotL * 2.0;
albedo与sceneSDF对齐判断:哪个物体最近即取其材质色。flux近似为一次漫反射出射能量:
\(\Phi(\mathbf{x}) \approx \rho(\mathbf{x})\,E_L\,\max(0,\mathbf{n}\cdot\mathbf{l})\,g\)
其中 $\rho$ 为反照率,$E_L$ 为光强(含颜色/强度),$g$ 是经验增益(代码中为 2.0,用于增强间接光)。
4. 输出三缓冲(MRT)
outPosition = vec4(pos, 1.0);
outNormal = vec4(nor, 0.0);
outFlux = vec4(flux, 1.0);
- Position.xyz:世界坐标,w=1 作为有效标记
- Normal.xyz:世界法线
- Flux.rgb:经光源调制的反射通量
Part 2:主渲染消费 RSM(阴影 + 间接光)
文件:shaders/sdf_practice.frag
Part 2 整体流程(数据与控制流)
- 相机射线与命中:由屏幕
uv与相机基向量求rd,用 Ray Marching 得到命中距离d、交点p=ro+rd*d与法线n,并根据getMaterial(p)取albedo。 - 投影到光相机:将世界点
p投影到光源正交平面,得到baseUV(光空间中的中心采样坐标)。 - 阴影可见性:
- 若
u.rsmParams.w>0.5,用 RSM Position 做“类深度”PCF 比较得到shadow∈[0,1];否则退回 SDF 软阴影。 - 将
shadow经强度和最暗值混合(防止全黑)。
- 若
- 直接光:用
shadow调制主光漫反射与高光累加到finalColor。 - 间接光(可选):若
u.rsmParams.w>0.5 && u.rsmParams.z>0.5,在baseUV周围半径/样本数受rsmParams.xy控制的邻域上采样 RSM(三缓冲),按 Lambert BRDF 聚合 VPL 贡献并归一化,按shadow自适应强度加入间接光。 - 其他光照与反射:填充光、边缘光、环境反射等艺术项叠加。
- 雾与色调:按距离做雾化与微弱色调混合,输出。
简化伪代码:
hit = rayMarch(ro, rd);
if (!hit) return sky;
p = ro + rd * d; n = getNormal(p); albedo = material(p);
baseUV = projectToLight(p);
shadow = (useRSM) ? rsmShadow(p, n) : softShadow(...);
color += directLight(p, n, albedo) * shadow;
if (useRSM && useIndirect) color += rsmIndirect(p, n, albedo, baseUV);
color = addFillRimEnv(color, ...);
color = applyFogTone(color, d);
A. 阴影可见性:基于 RSM Position 的“类深度”比较
函数:rsmShadow(p, n)(节选)
vec3 rel = p - u.lightOrigin.xyz;
vec2 base = vec2(dot(rel, u.lightRight.xyz)/u.lightOrthoHalfSize.x,
dot(rel, u.lightUp.xyz)/u.lightOrthoHalfSize.y);
vec2 uv = base * 0.5 + 0.5;
vec3 Ld = normalize(u.lightDir.xyz);
float tSurface = dot(rel, Ld);
// PCF 样本中,从 rsmPositionTex 读出 VPL 的世界坐标
vec3 vplPos = texture(rsmPositionTex, uv + duv).xyz;
float tRsm = dot(vplPos - u.lightOrigin.xyz, Ld);
float bias = 0.02 + 0.10 * (1.0 - max(dot(n, Ld), 0.0));
float visible = (tRsm + bias < tSurface) ? 0.0 : 1.0;
- 将世界点
p投影到光相机平面,得到 RSM 纹理坐标uv。 - 以光方向
Ld定义“深度”标量:$t=\langle x-\mathbf{o}_L,\,\mathbf{L}_d\rangle$。 - 用 Position 缓冲的世界坐标反推 RSM 像素的“深度” $t_{RSM}$ 与当前表面“深度” $t_{surface}$ 比较。
- 斜率偏置
bias随 $1-\mathbf{n}\cdot\mathbf{L}_d$ 增大,缓解自阴影。 - 使用 8 点 PCF 平均可见性,半径受
u.rsmParams.x与纹理分辨率缩放。
数学上,单样本可见性为:
\(V = \mathbb{I}\big[t_{RSM} + b < t_{surface}\big]\)
多样本 PCF 取均值:$\bar V = \frac{1}{N}\sum_i V_i$。
可见性作为直接光的阴影因子:
finalColor += (diff * albedo + spec * lightColor) * lightColor * shadow * u.lightDir.w;
其中 shadow 由 RSM/PCF 得到(或回退为 SDF 软阴影)。
如何将一个3D空间中的点 p 投影到光源视角?
这个投影过程的核心目标是:找出三维空间中的点 p 会出现在光源“摄像机”所渲染的二维纹理(即RSM纹理)的哪个位置上。
// Project point to light ortho plane
vec3 rel = p - u.lightOrigin.xyz;
vec2 base = vec2(dot(rel, u.lightRight.xyz) / max(u.lightOrthoHalfSize.x, 1e-4),
dot(rel, u.lightUp.xyz) / max(u.lightOrthoHalfSize.y, 1e-4));
vec2 uv = base * 0.5 + 0.5;
这个过程可以分解为以下四个步骤:
a. 转换到光源的局部坐标系(平移)
vec3 rel = p - u.lightOrigin.xyz;
p: 这是我们要投影的那个点的世界坐标(World Space a_position)。u.lightOrigin.xyz: 这是光源“摄像机”在世界空间中的位置。rel(relative a_position): 通过用点的坐标减去光源的原点坐标,我们得到了一个从光源指向点p的向量。这等效于将整个坐标系进行平移,使得光源位于原点(0, 0, 0)。现在,rel就代表了点p在以光源为中心的新坐标系中的位置。
b. 投影到光源的视图平面(投影)
vec2 base = vec2(dot(rel, u.lightRight.xyz),
dot(rel, u.lightUp.xyz));
(为了清晰,暂时忽略后面的除法)
这一步是整个投影过程的核心。光源拥有自己的一套坐标基向量,类似于主摄像机有 cu (右), cv (上), cw (前)。这里的 u.lightRight 和 u.lightUp 就扮演了光源摄像机的“右”和“上”的角色。
u.lightRight.xyz: 一个单位向量,代表光源视图的水平方向(X轴)。u.lightUp.xyz: 一个单位向量,代表光源视图的垂直方向(Y轴)。dot(a, b)(点积): 当向量b是一个单位向量时,dot(a, b)的几何意义是计算向量a在向量b方向上的投影长度。
所以:
dot(rel, u.lightRight.xyz)计算出点p(相对于光源) 在光源 “右” 方向上的距离。这就是点p在光源视图中的 X坐标。dot(rel, u.lightUp.xyz)计算出点p(相对于光源) 在光源 “上” 方向上的距离。这就是点p在光源视图中的 Y坐标。
执行完这一步后,base 这个 vec2 变量就存储了点 p 在光源二维视图平面上的坐标(以世界单位计)。
c. 规范化坐标(正交投影)
vec2 base = vec2(...,
... / max(u.lightOrthoHalfSize.y, 1e-4));
这个Shader使用的是正交投影(Orthographic Projection),这意味着光源的视锥体是一个长方体,而不是像透视投影那样的角锥体。
u.lightOrthoHalfSize: 这个变量定义了光源视锥体(那个长方体)尺寸的一半。u.lightOrthoHalfSize.x是宽度的一半,u.lightOrthoHalfSize.y是高度的一半。
通过将上一步得到的坐标除以 lightOrthoHalfSize,我们将坐标从世界单位转换为了规范化设备坐标 (Normalized Device Coordinates, NDC)。
- 如果一个点正好在光源视锥体的右边缘,它的X坐标就等于
lightOrthoHalfSize.x,相除后得到1.0。 - 如果一个点正好在左边缘,它的X坐标是
-lightOrthoHalfSize.x,相除后得到-1.0。 - Y坐标同理。
经过这步计算后,base 变量的 x 和 y 分量都被映射到了 [-1.0, 1.0] 的范围内。任何在这个范围之外的点都意味着它在光源的视锥体之外。
d. 转换为UV纹理坐标
vec2 uv = base * 0.5 + 0.5;
最后一步是将 [-1.0, 1.0] 的NDC坐标转换为 [0.0, 1.0] 的UV纹理坐标,以便能正确地采样RSM纹理。这是一个标准的线性变换:
- 当值为
-1.0时:-1.0 * 0.5 + 0.5 = 0.0 - 当值为
0.0时:0.0 * 0.5 + 0.5 = 0.5 - 当值为
1.0时:1.0 * 0.5 + 0.5 = 1.0
计算完成后,uv 变量就包含了点 p 在光源渲染的RSM纹理上对应的二维坐标。有了这个坐标,我们就可以去 rsmPositionTex, rsmNormalTex, 和 rsmFluxTex 中采样,获取那个位置的深度、法线和光通量信息,用于阴影计算和间接光照。
整个过程可以看作是一次完整的 “世界空间 -> 光源视图空间 -> 光源裁剪空间 -> 纹理空间” 的变换,这与我们常规渲染管线中的顶点变换过程非常相似,只是这里是在片元着色器中手动完成的,并且使用的是正交投影而非透视投影。
B.RSM Shadow
RSM阴影的计算原理本质上与传统的阴影贴图 (Shadow Mapping) 技术非常相似。其核心思想是:
- 深度测试:从当前着色点
p的角度,看它离光源有多远。 - 查询记录:查询“阴影贴图”(在这里是RSM的位置纹理),看看在同一个方向上,离光源最近的物体有多远。
- 比较:如果当前点
p的距离比记录的最近距离要远,那么它就被挡住了,处于阴影中。否则,它就是可见的,被照亮。
这个Shader通过一种名为 PCF (Percentage-Closer Filtering) 的柔化技术实现了这个过程,使得阴影边缘更加柔和自然。
RSM阴影的计算流程如下:
- 将当前着色点
p投影到光源的UV空间。 - 计算点
p相对于光源的深度tSurface。 - 在
p对应的UV坐标周围进行多次(8次)采样。 - 在每次采样中:
a. 从RSM位置纹理中读取遮挡物的世界坐标vplPos。
b. 计算遮挡物的深度tRsm。
c. 将tSurface与tRsm + bias进行比较,判断是否可见。 - 将8次采样的可见性结果求平均,得到一个
0.0(全黑) 到1.0(全亮) 之间的值,作为最终的阴影系数。
下面是 rsmShadow 函数的详细步骤分解:
a. 投影到光源空间
// Project point to light ortho plane
vec3 rel = p - u.lightOrigin.xyz;
vec2 base = vec2(dot(rel, u.lightRight.xyz) / max(u.lightOrthoHalfSize.x, 1e-4),
dot(rel, u.lightUp.xyz) / max(u.lightOrthoHalfSize.y, 1e-4));
vec2 uv = base * 0.5 + 0.5;
这一步我们已经知道了,它的作用是计算出当前着色点 p 在光源的RSM纹理上对应的UV坐标。
b. 计算当前点的“光源深度”
// Light forward = from light to scene
vec3 Ld = normalize(u.lightDir.xyz);
float tSurface = dot(rel, Ld);
Ld: 这是光源的“前向”向量,即光线照射的方向。tSurface: 这是本步骤的关键。我们通过计算rel(从光源指向点p的向量) 在光源方向Ld上的投影,得到了点p沿着光照方向,相对于光源原点的距离。你可以把它理解为点p在光源坐标系下的“深度值”。这个值将作为我们后续比较的基准。
c. 柔化阴影采样 (PCF)
传统的阴影贴图只采样一次,会导致阴影边缘出现锯齿。为了得到柔和的阴影,这里在 uv 坐标周围的一个小区域内进行了多次采样。
vec2 texel = 1.0 / max(u.rsmResolution.xy, vec2(1.0));
float radius = max(u.rsmParams.x, 0.5);
vec2 offs[8] = vec2[8](...); // 8个预设的采样偏移方向
float sum = 0.0;
for (int i = 0; i < 8; ++i) {
// ... 循环内部 ...
}
return sum / 8.0;
offs: 定义了8个围绕中心点的采样方向。radius: 控制采样范围的大小,值越大,阴影边缘越模糊。texel: 单个纹素(像素)的大小,用于将radius从像素单位转换成UV单位。- 循环:代码将进行8次采样,每次都在
uv的基础上加上一点偏移duv。 sum / 8.0: 最后,将8次采样的结果取平均值。如果8次采样都表明点是亮的,结果是8/8 = 1.0(全亮);如果4次亮4次暗,结果是4/8 = 0.5(半透明阴影)。这就是柔和边缘的来源。
d. 循环内部的核心——深度比较
现在我们来看 for 循环内部每一轮发生了什么,这是阴影测试的核心。
// 1. 获取采样点的UV坐标
vec2 duv = offs[i] * radius * texel;
vec2 sampleUV = clamp(uv + duv, 0.0, 1.0);
// 2. 从RSM位置纹理中读取遮挡物的世界坐标
vec3 vplPos = texture(rsmPositionTex, sampleUV).xyz;
// 3. 计算遮挡物的“光源深度”
float tRsm = dot(vplPos - u.lightOrigin.xyz, Ld);
// 4. 加上偏移(Bias)后进行比较
float bias = 0.02 + 0.10 * slope; // (稍后解释)
float visible = (tRsm + bias < tSurface) ? 0.0 : 1.0; // 核心比较
// 5. 累加结果
sum += visible;
- 获取采样UV:计算出当前这第
i次采样的实际UV坐标。 - 读取遮挡物位置:使用这个
sampleUV从rsmPositionTex纹理中采样。这个纹理存储的是从光源视角看过去,场景中每个点最近的那个物体的世界坐标。我们把这个坐标称为vplPos(虚拟点光源位置)。 - 计算遮挡物深度:用与步骤2完全相同的方法,计算出
vplPos的光源深度tRsm。tRsm代表了在当前采样方向上,离光源最近的那个物体表面的深度。 - 深度比较:
tRsm + bias < tSurface: 这就是最终的判断。- 如果
tSurface(当前点的深度) 大于tRsm(遮挡物的深度),意味着当前点p在遮挡物的后面,因此它在阴影中。visible被设为0.0。 - 否则,当前点
p没有被遮挡,是可见的。visible被设为1.0。
e. 解决“阴影粉刺” (Shadow Acne) 的偏移(Bias)
// Receiver-plane depth bias to reduce self-shadowing on curved surfaces
float slope = 1.0 - max(dot(n, Ld), 0.0);
float bias = 0.02 + 0.10 * slope;
由于浮点数精度限制和纹理采样的离散性,一个物体表面上的点在进行深度比较时,可能会因为微小的误差而判断自己被自己遮挡了,从而在被光照亮的表面上出现许多错误的黑色斑点,这种现象被称为“阴影粉刺”或“自遮挡”。
为了解决这个问题,我们在比较时给从纹理中读出的深度 tRsm 加上一个很小的正值 bias。这相当于在计算时,将遮挡物稍微往“远离”光源的方向推了一点点,从而确保物体不会错误地遮挡自己。
我们还使用了更高级的斜率缩放偏移 (Slope-Scale Bias):
dot(n, Ld)计算表面法线n和光照方向Ld的夹角。- 当表面几乎平行于光线时 (即光线以很刁钻的角度掠过表面),
dot(n, Ld)接近0,slope接近1,bias会变得更大。这是因为这种表面的深度变化最快,最容易产生阴影粉刺,所以需要更大的偏移量。 - 当表面正对光源时,
dot(n, Ld)接近1,slope接近0,bias就很小。
B. 一次反弹间接光:在 RSM 上的邻域采样
函数:getLight(...) 的 RSM 采样分支(节选)
vec2 baseUV = base * 0.5 + 0.5; // p 投影到光相机平面的中心 uv
for (int i = 0; i < N; ++i) {
vec2 duv = (offs[i] + jitter * 0.05) * radius / u.rsmResolution.xy;
vec2 uv = clamp(baseUV + duv, 0.0, 1.0);
vec3 vplPos = texture(rsmPositionTex, uv).xyz;
vec3 vplNor = normalize(texture(rsmNormalTex, uv).xyz);
vec3 flux = texture(rsmFluxTex, uv).xyz;
if (length(vplPos) < 0.1) continue; // 无效 VPL
vec3 wi = normalize(vplPos - p);
float cos1 = max(dot(n, wi), 0.0); // 接收面余弦
float cos2 = max(dot(vplNor, -wi), 0.0); // 发光面余弦
float dist = length(vplPos - p);
float distWeight = 1.0 / (1.0 + dist * dist);
float w = cos1 * cos2 * distWeight;
vec3 brdf = albedo / 3.14159; // Lambert
bounce += brdf * flux * w;
}
finalColor += indirectStrength * bounce / totalWeight;
- 每个 RSM 像素视作 VPL,其通量
flux已含一次反射。 - 经典近似:
\(L_i(\mathbf{x}\to\mathbf{v}) \approx \sum_{j\in\mathcal{N}} \frac{\rho(\mathbf{x})}{\pi}\,\Phi_j\,\frac{\max(0,\mathbf{n}_x\cdot\mathbf{w}_j)\max(0,\mathbf{n}_j\cdot(-\mathbf{w}_j))}{1+\|\mathbf{x}-\mathbf{x}_j\|^2}\)
其中 $\mathbf{w}_j$ 指向 VPL 的方向,分母用 $1+\mathrm{dist}^2$ 做能量衰减与数值稳定。 - 通过
offs[32]+jitter做抖动与分布采样;radius与samples由u.rsmParams控制。 indirectStrength = mix(0.8, 0.3, shadow):在阴影区给更多间接光,避免过曝。
a. 将当前着色点投影到RSM空间
为了在RSM贴图中找到附近的VPLs,我们首先需要知道当前着色点 p 对应于RSM贴图的哪个位置。这一步在之前的步骤中已经做了详细介绍,这里不做赘述。
vec3 rel = p - u.lightOrigin.xyz;
vec2 base = vec2(dot(rel, u.lightRight.xyz) / max(u.lightOrthoHalfSize.x, 1e-4),
dot(rel, u.lightUp.xyz) / max(u.lightOrthoHalfSize.y, 1e-4));
vec2 baseUV = base * 0.5 + 0.5;
u.lightOrigin,u.lightRight,u.lightUp定义了光源摄像机的坐标系。rel计算出点p相对于光源摄像机原点的位置向量。dot(...)将该向量投影到光源摄像机的右方向(X轴)和上方向(Y轴)上,并除以光源视锥体的一半大小lightOrthoHalfSize,将其归一化到[-1, 1]的范围。base * 0.5 + 0.5将[-1, 1]的坐标转换为[0, 1]的UV坐标,这个baseUV就是点p在RSM贴图上的中心采样点。
b. 在RSM中采样周围的虚拟点光源(VPLs)
我们不能只采样一个VPL,那样会导致结果充满噪点。因此,我们在 baseUV 周围的一个区域内进行多次采样,收集多个VPLs的光照贡献。
int N = min(samples, 32);
float totalWeight = 0.0;
vec3 bounce = vec3(0.0);
for (int i = 0; i < N; ++i) {
// ... 计算采样UV ...
vec2 duv = (offs[i] + jitter * 0.05) * radius / max(u.rsmResolution.xy, vec2(1.0));
vec2 uv = clamp(baseUV + duv, 0.0, 1.0);
// ... 从RSM贴图中读取VPL信息 ...
vec3 vplPos = texture(rsmPositionTex, uv).xyz;
vec3 vplNor = normalize(texture(rsmNormalTex, uv).xyz);
vec3 flux = texture(rsmFluxTex, uv).xyz;
// ... 计算该VPL的光照贡献 ...
}
- 代码使用了一个预定义的
offs数组和一个随机jitter来确定采样点,形成一个漂亮的采样模式,这比纯随机采样效果更好。radius控制采样范围的大小。 - 在循环中,通过
texture(...)函数从三张RSM贴图中读取每个采样VPL的世界位置、法线和辐射通量。
c. 计算单个VPL的光照贡献(核心物理模型)
这部分是整个算法的核心,它模拟了光从VPL传播到着色点p的过程。这本质上是在求解渲染方程(Rendering Equation)的一个简化形式。
渲染方程的简化形式为:
$L_{indirect}(p) \approx \sum_{i=1}^{N} \text{BRDF}(p) \cdot \Phi_i \cdot G(p, p_i)$
其中:
- $L_{indirect}(p)$ 是点
p接收到的间接光。 - $\text{BRDF}(p)$ 是点
p表面的双向反射分布函数,描述了光线如何被反射。 - $\Phi_i$ 是第 $i$ 个VPL的辐射通量(
flux)。 - $G(p, p_i)$ 是几何项,描述了点
p和VPL $p_i$ 之间的几何关系(距离、角度等)。
让我们看看代码如何实现每一项:
-
BRDF (双向反射分布函数)
vec3 brdf = albedo / 3.14159; // Lambert BRDF这里使用了最简单的兰伯特(Lambertian)漫反射模型。对于理想的漫反射表面,其BRDF为 $\frac{albedo}{\pi}$,其中
albedo是表面的基础色。 -
几何项 $G(p, p_i)$
几何项包含了两点之间的可见性、距离衰减以及两个表面的相对角度。
vec3 wi = vplPos - p; float dist = length(wi); wi = normalize(wi); // 从p指向VPL的方向向量 float cos1 = max(dot(n, wi), 0.0); float cos2 = max(dot(vplNor, -wi), 0.0); float distWeight = 1.0 / (1.0 + dist * dist); float sampleWeight = cos1 * cos2 * distWeight;cos1 = max(dot(n, wi), 0.0): 这是在接收点p的朗伯余弦定律,即 $n_p \cdot \omega_i$。它表示从VPL射来的光线与表面p的法线之间的夹角。夹角越大,接收到的能量越少。cos2 = max(dot(vplNor, -wi), 0.0): 这是在VPL发射点的朗伯余弦定律,即 $n_{vpl} \cdot (-\omega_i)$。它表示VPL表面法线与光线射出方向之间的夹角。distWeight = 1.0 / (1.0 + dist * dist): 这是光的距离平方反比衰减。标准的物理公式是 $\frac{1}{dist^2}$。代码中写作1.0 / (1.0 + dist * dist)是一种常见的改进,可以避免当dist趋近于0时值趋于无穷大,使衰减更平滑。
所以,
sampleWeight完整地表达了上述几何项:
$G(p, p_i) = \frac{\max(0, n_p \cdot \omega_i) \cdot \max(0, n_{vpl} \cdot -\omega_i)}{1.0 + d^2}$
其中 $d$ 是dist,$\omega_i$ 是wi。 -
累加贡献
bounce += brdf * flux * sampleWeight; totalWeight += sampleWeight;我们将每个VPL计算出的光照贡献
brdf * flux * sampleWeight累加到bounce变量中。
d. 归一化并应用
if (totalWeight > 0.0) {
float indirectStrength = mix(0.8, 0.3, shadow); // More indirect in shadows
finalColor += indirectStrength * bounce / totalWeight;
}
bounce / totalWeight: 对累加的结果进行归一化,这是一种蒙特卡洛积分的近似,可以得到更稳定的平均光照贡献。indirectStrength = mix(0.8, 0.3, shadow): 这是一个非常巧妙的艺术处理。shadow值越接近0(表示点p在阴影中),indirectStrength就越高(接近0.8);反之,在被直接照亮的区域,indirectStrength就越低。这模拟了人眼在暗处对间接光更敏感的现象,也让场景的暗部细节更丰富。- 最后,将计算出的间接光照
bounce添加到最终颜色finalColor中。
3. 直接光与其他补充项
- 直接光:经典漫反射 + 高光(简化 GGX),被
shadow调制。 - 填充光、边缘光、环境反射:在 RSM 框架外的艺术项,帮助构图与层次。
- 雾与色调:后期做轻微混色,提升舒适度。
参数调优与性能权衡
- Ray Marching:
- 降低
MAX_STEPS或提高步长下限可提速但会漏检细节。 SURF_DIST越小法线越稳定但成本增加。
- 降低
- 阴影:
- PCF 样本数(此处 8)与半径
rsmParams.x控制过渡平滑与接缝;半径应与分辨率成比例。 - 斜率偏置:
bias = base + k * (1 - n·L),减少自阴影条纹。
- PCF 样本数(此处 8)与半径
- 间接光:
- 采样数
rsmParams.y与半径rsmParams.x:半径太小会噪点,太大则漂白;采样数增加能抑噪但开销线性上升。 - 抖动
jitter+ 帧间累计(若可用)能显著降噪。
- 采样数
- 能量标定:
flux的经验增益(×2.0)应结合实际观感校准;可与u.lightDir.w、lightColors[0].a协同调节。
常见问题与排查
- 看起来一片黑/一片白:
- 检查
lightDir正负与两 pass 是否一致;光相机平面方向是否与lightRight/lightUp正交。 lightOrthoHalfSize是否覆盖了场景主体。
- 检查
- 严重自阴影/条纹:
- 增大
bias基础值与斜率项系数;缩小 PCF 半径尝试。
- 增大
- 间接光溢出/漏光:
- 限制采样
cos1/cos2下限(代码已用 0.05 做早停),加入距离权重与法线一致性筛选。 - 距离下限(如
dist < 0.05跳过)避免自照明。
- 限制采样
- RSM 调试:
- 打开
debugParams.x在主渲染中可视化 flux/normal/position 的混合视图,便于判定 RSM 是否正确渲染与对齐。
- 打开
- Gamma/色彩偏差:
- 交换链(sRGB)+ 纹理(sRGB)时避免额外 Gamma;本项目在主渲染中移除了手动 Gamma,保留轻微色调混合。
进一步优化方向
- 分层/瓦片化:屏幕空间分块共享 RSM 采样,提升缓存命中率。
- 重要性采样:按 Flux 与法线对齐度分布采样,减少无效 VPL。 ✅ 2025-09-01